
Added video link
Browse files
README.md
CHANGED
|
@@ -15,4 +15,4 @@ This dataset is used for the demonstration of the Vision Language Action model f
|
|
| 15 |
It is collected using a modified version of LeKiwi with 3 cameras, but technically, only the arm is used, so it can be treated as a dataset for SO-ARM100.
|
| 16 |
In this dataset, I teleoperated a robot to complete a basic pick and place task.
|
| 17 |
|
| 18 |
-
Follow my video series about VLAs to learn more:
|
|
|
|
| 15 |
It is collected using a modified version of LeKiwi with 3 cameras, but technically, only the arm is used, so it can be treated as a dataset for SO-ARM100.
|
| 16 |
In this dataset, I teleoperated a robot to complete a basic pick and place task.
|
| 17 |
|
| 18 |
+
Follow my video series about VLAs to learn more: [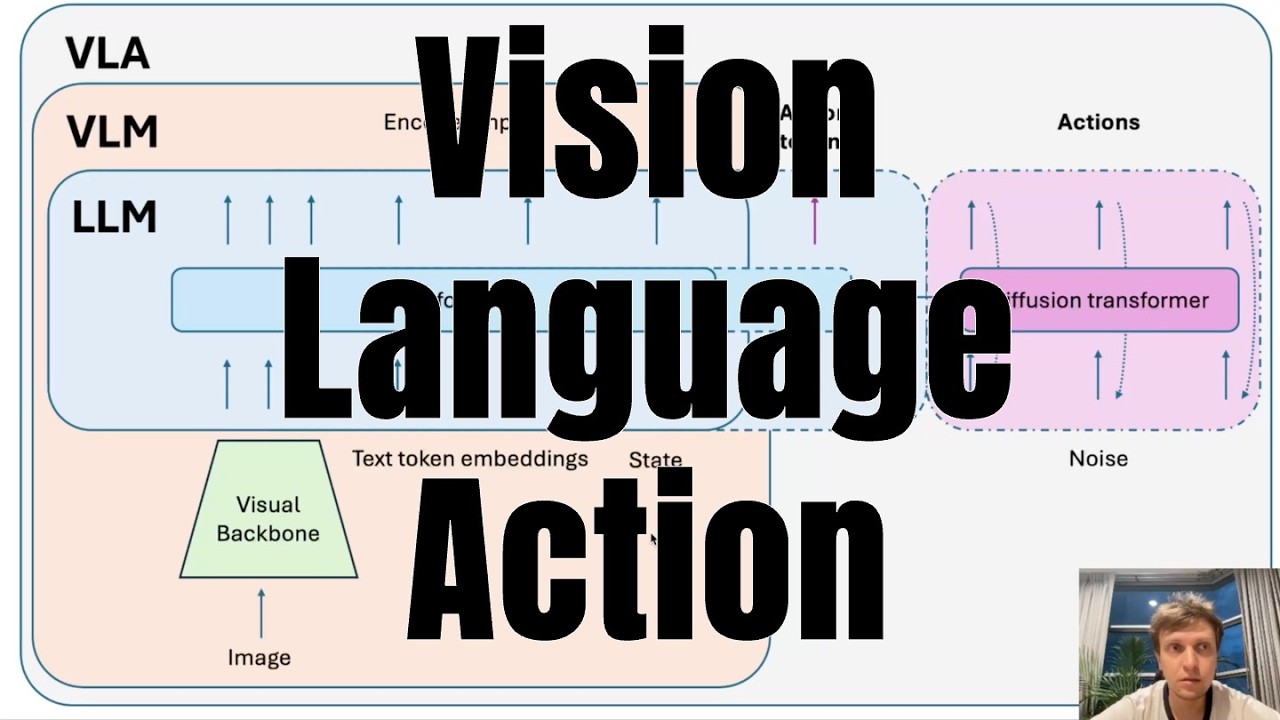](https://youtu.be/8dZUOo5xWFw)
|