Datasets:

Access Request for ClaraVid Dataset
This repository is publicly accessible, but you have to accept the conditions to access its files and content.
By submitting this request, you confirm that you have read and agree to the following terms:
• You have reviewed and accept the CC BY-NC-SA 4.0 license (https://creativecommons.org/licenses/by-nc-sa/4.0/)
• You will not employ the dataset in any context that could directly or indirectly cause harm to individuals or communities
• You will properly acknowledge and cite the dataset in any derivative works or publications
Log in or Sign Up to review the conditions and access this dataset content.
WIP - PAGE UNDER CONSTRUCTION.
ClaraVid Dataset
Accepted ICCV 2025
1. Introduction
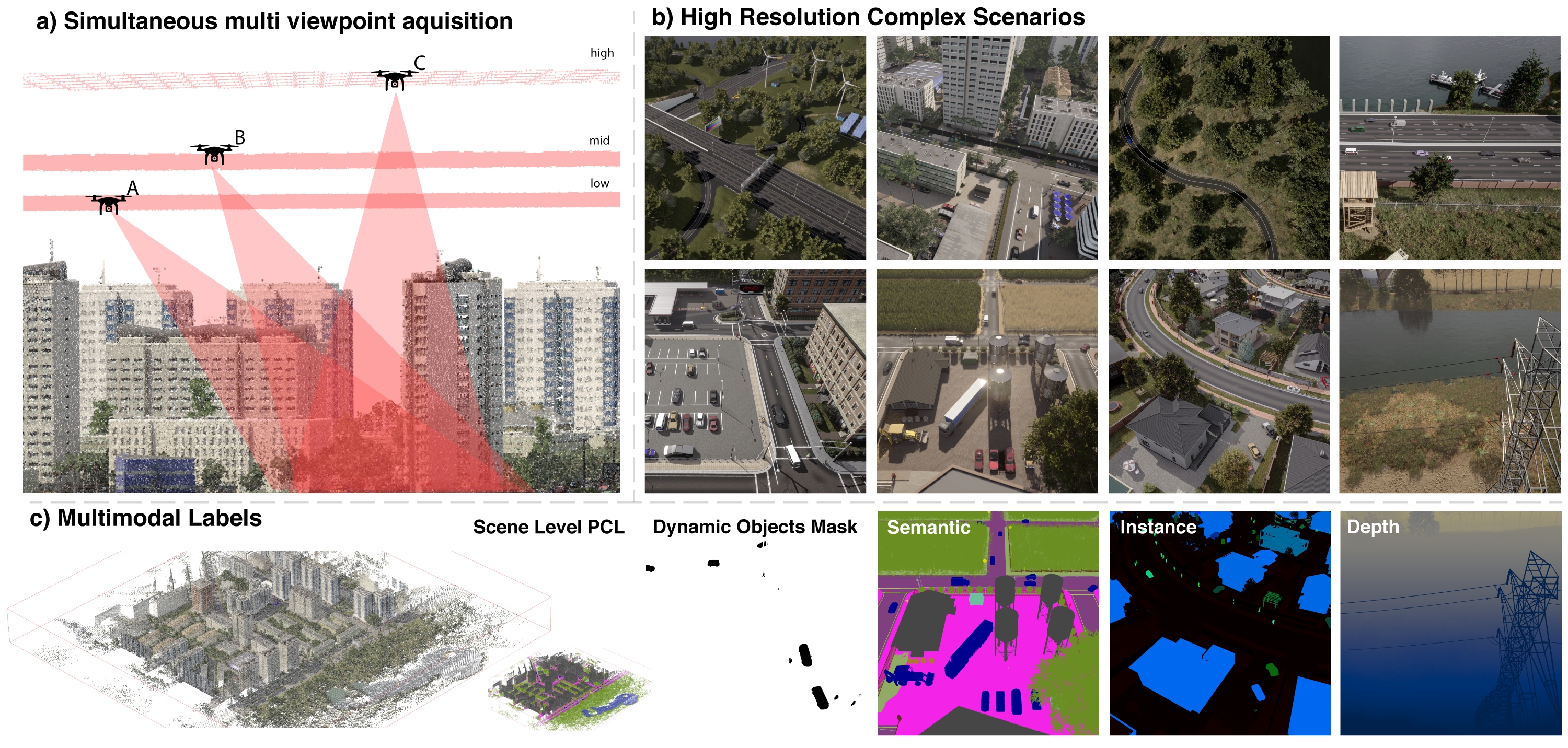
ClaraVid is a synthetic dataset built for semantic and geometric neural reconstruction from low altitude UAV/aerial imagery. It contains 16,917 multimodal frames collected across 8 UAV missions over diverse environments: urban, urban high, rural, highway, and nature. Each mission features 3 viewpoints and altitude levels, simulating multi-UAV operations. The dataset spans 1.8km^2, with an average mission coverage of 0.22km^2. It includes visual measurements at 4032x3024 resolution for RGB images, metric depth maps, panoptic(semantic and instance) segmentation and dynamic object masks. Additionally in contains scene level pointcloud and camera calibration(intrinsic and extrinsic).
2. Channel Log
TODO
3. Download
TODO
4. Usage
We provide a dataset SDK on GitHub. TODO
5. Dataset structure
All collection missions follow a grid pattern with both vertical and horizontal passes at a constant altitude, with a few seconds between consecutive frames.
claravid/
├── 001_rural_1/ # mission 1
│ ├── left_rgb/
│ │ ├── 45deg_low_h/ # 3 different viewpoints (pitch&altitude) & flying orientation in grid (horizontal or vertical passes)
│ │ │ ├── 000000.jpg
│ │ │ └── ...
│ │ ├── 45deg_low_v/
│ │ │ └── ...
│ │ ├── 55deg_mid_h/
│ │ │ └── ...
│ │ ├── 55deg_mid_v/
│ │ │ └── ...
│ │ ├── 90deg_high_h/
│ │ │ └── ...
│ │ └── 90deg_high_v/
│ │ └── ...
│ ├── depth/ # metric depth
│ │ └── ...
│ ├── panoptic_seg/ # instance (buildings, humans and vehicles) & semantic segmentation
│ │ └── ...
│ ├── semantics_colormap/ # semantic segmentation - RGB color version
│ │ └── ...
│ ├── dynamic_mask/
│ │ └── ...
│ ├── extrinsics/
│ │ └── ...
│ └── scene_pcl/ # scene level PCL (color, semantic, instance) @ various resolutions (30cm, 50cm, ...)
│ ├── pcl_30cm.ply
│ └── ...
├── 002_rural_2/ # mission 2...
│ └── ...
└── ...
6. Data format
| Modality | Directory | Extension | Description |
|---|---|---|---|
| RGB | left_rgb | .jpg | 4032 x 3024 |
| Depth | depth | .png | metric depth - [0-1000]m |
| Panoptic Segmentation | panoptic_seg | .png | instance (buildings, humans and vehicles) + semantic mask |
| Dynamic mask | dynamic_mask | .png | binary mask for objects that move (dynamic_elements == 0) |
| Camera Extrinsics | extrinsics | .json | (x-forward, y-right, z-up) in scene space (metric) |
| ScenePointcloud | scene_pcl | .pcl | scene pointclouds in scene space |
7. BibTex
If you found our work useful, please cite it using:
@article{beche2025claravid,
title={ClaraVid: A Holistic Scene Reconstruction Benchmark From Aerial Perspective With Delentropy-Based Complexity Profiling},
author={Beche, Radu and Nedevschi, Sergiu},
journal={arXiv preprint arXiv:2503.17856},
year={2025}
}
- Downloads last month
- 71